Dalam matematika, isometri adalah transformasi yang mempertahankan jarak antar ruang metrik, yang sering disebut gerakan kaku dalam geometri, karena memetakan suatu bangun ke posisi baru tanpa mengubah bentuk atau ukurannya. Sifat kuncinya adalah jarak antara dua titik setelah transformasi tetap sama dengan jarak sebelum transformasi.
Beberapa Pemetaan Standar dari Bidang Datar
Kita perlu mendefinisikan pengertian kekongruenan. Misalnya, jika diberikan dua cakram dengan jari-jari yang sama seperti pada Gambar 1, kita ingin mengatakan bahwa keduanya kongruen.
Demikian pula, jika diberikan dua segitiga seperti pada Gambar 2, kita juga ingin mengatakan bahwa keduanya kongruen.
Secara garis besar, ini berarti bahwa satu bangun dapat ditumpangkan di atas bangun lainnya. Untuk membahas konsep kekongruenan dengan benar, akan lebih mudah untuk mendefinisikan terlebih dahulu konsep yang sedikit lebih umum, yaitu isometri. Untuk melakukan itu, kita harus mendefinisikan konsep yang lebih umum lagi, yaitu pemetaan. Semua konsep ini cukup umum, dan kita akan melihat bahwa konsep-konsep ini mencakup, sebagai kasus khusus, hal-hal yang dapat kita visualisasikan dengan mudah, seperti refleksi, rotasi, peregangan, dll., yang diberikan sebagai contoh. Kita akan membahas hal-hal ini terlebih dahulu, dan kemudian membahas kekongruenan di bagian terakhir.
Yang dimaksud dengan pemetaan (atau peta) bidang ke dirinya sendiri adalah sebuah asosiasi, yang mana setiap titik pada suatu bidang mengasosiasikan titik lain pada bidang tersebut. Jika adalah sebuah titik dan adalah titik yang diasosiasikan dengan oleh pemetaan tersebut, maka kita menunjuknya dengan tanda panah khusus.
Titik yang terkait dengan disebut nilai pemetaan di . Kita juga mengatakan bahwa berkorespondensi dengan di bawah pemetaan, atau bahwa dipetakan pada .
Sama seperti kita menggunakan huruf untuk menunjukkan angka, ada baiknya menggunakan huruf untuk menunjukkan pemetaan. Jadi, jika adalah pemetaan bidang ke dirinya sendiri, kita menunjukkan nilai di dengan simbol-simbol.
Kita juga akan mengatakan bahwa nilai dari di adalah bayangan di bawah . Jika , maka kita juga mengatakan bahwa memetakan pada .
Berdasarkan definisi, jika dan adalah pemetaan bidang ke dirinya sendiri, maka kita memiliki
jika dan hanya jika, untuk setiap titik ,
Dengan kata lain, sebuah pemetaan sama dengan pemetaan jika dan hanya jika dan memiliki nilai yang sama di setiap titik .
Pemetaan konstan
Misalkan adalah titik yang diberikan pada bidang. Untuk setiap titik , kita mengaitkan titik yang diberikan ini. Kemudian kita memperoleh pemetaan, dan adalah nilai pemetaan pada setiap titik . Kita mengatakan bahwa pemetaan ini konstan, dan bahwa adalah nilai konstannya.
Identitas
Untuk setiap titik , kita mengaitkan itu sendiri. Ini adalah pemetaan yang cukup sederhana, yang disebut identitas, dan dilambangkan dengan . Dengan demikian kita memiliki
untuk setiap titik .
Refleksi melalui sebuah garis
Misalkan adalah sebuah garis. Jika adalah sembarang titik, misalkan
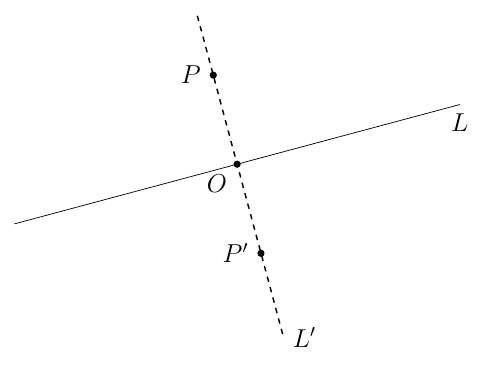
Misalkan adalah garis yang melalui dan tegak lurus terhadap . Misalkan adalah titik perpotongan dan . Misalkan P’ adalah titik pada yang berjarak sama dari seperti , tetapi berlawanan arah. Hubungannya
disebut refleksi melalui , dan dapat dilambangkan dengan . Gambar:
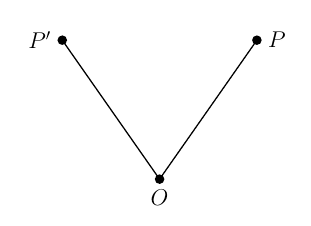
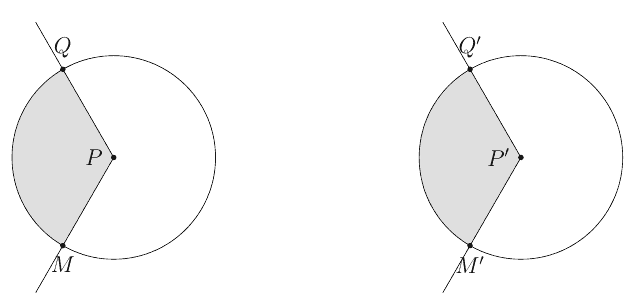
Misalkan adalah titik yang diberikan pada bidang. Untuk setiap titik pada bidang, kita mengaitkan titik yang terletak pada garis yang melewati dan , di sisi lain dari P, dan pada jarak yang sama dari seperti . Pemetaan ini disebut refleksi melalui . Gambar berikut
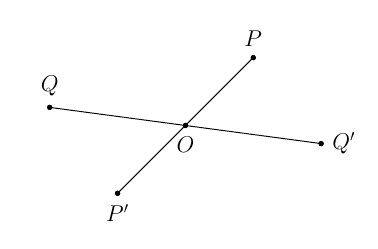
Kita telah menggambar sebuah titik dan nilainya di bawah pemetaan tersebut, dan juga sebuah titik dan nilainya di bawah pemetaan tersebut.
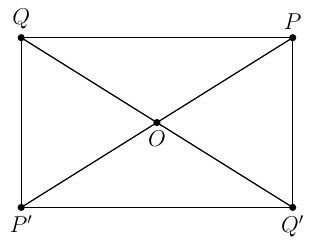
Sebagai contoh, kita dapat mencerminkan keempat sudut persegi panjang melalui titik tengah dari persegi panjang tersebut. Setiap sudut dipetakan ke sudut yang berlawanan, seperti pada Gambar 5.
Dilasi atau Peregangan
Misalkan adalah titik yang diberikan pada bidang. Untuk setiap titik pada bidang, kita mengaitkan titik yang terletak pada sinar , dengan titik sudut , yang melewati , pada jarak dari yang sama dengan dua kali jarak dari . Titik dalam hal ini juga dilambangkan dengan . Gambar:
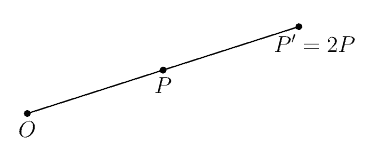
Pemetaan khusus ini disebut dilasi 2, atau peregangan 2, relatif terhadap . Menurut notasi kita, jika adalah dilasi 2, relatif terhadap , maka kita memiliki
Pada Gambar 7 (a) telah menggambar titik-titik
dan
Pada Gambar 7 (b) telah menggambar titik-titik
Dilasi terkadang juga disebut transformasi kesamaan, tetapi
kata dilasi adalah istilah terpendek dan terbaik yang digunakan untuk menunjukkan konsep tersebut.
Rotasi
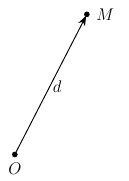
Misalkan adalah titik yang diberikan pada bidang datar, dan misalkan adalah sudut. Misalkan adalah titik pada jarak d dari . Misalkan adalah lingkaran dengan jari-jari yang berpusat di . Misalkan adalah titik pada lingkaran ini sedemikian sehingga sudut memiliki jumlah derajat yang sama dengan . Pemetaan yang mengaitkan dengan disebut rotasi (berlawanan arah jarum jam) oleh , terhadap , atau relatif terhadap . Jika kita menyatakan pemetaan ini dengan , maka kita dapat mengilustrasikannya pada Gambar 8 (a), di mana kita telah menggambar , , dan .
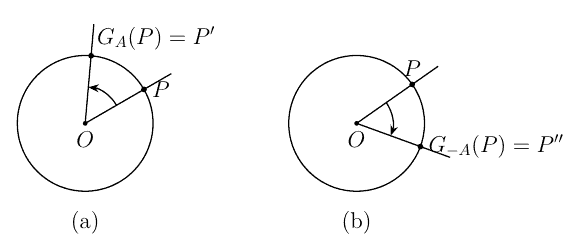
Kecuali dinyatakan lain, rotasi dengan sudut akan selalu berarti rotasi berlawanan arah jarum jam. Tentu saja, kita juga dapat mendefinisikan rotasi searah jarum jam dengan , yang kita lambangkan dengan . Ini mengaitkan setiap titik dengan titik pada jarak yang sama dari seperti , dan sedemikian rupa sehingga sudutnya
memiliki ukuran yang sama dengan , seperti pada Gambar 8 (b).
Perhatikan bahwa sudut yang diberikan belum tentu sama dengan sudut yang dibentuk oleh
(lihat Gambar 9) meskipun keduanya memiliki ukuran yang sama. Namun, pengalaman menunjukkan bahwa dalam diskusi semacam ini, menunjukkan
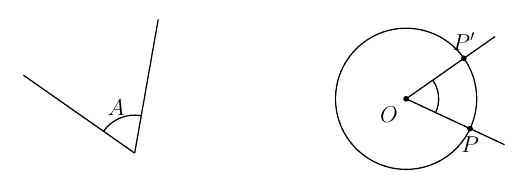
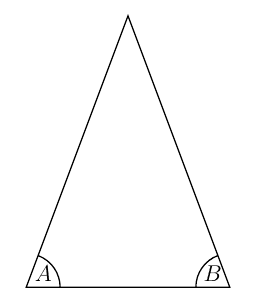
sebagai sudut tidaklah berbahaya, dan seringkali lebih mudah untuk melakukan hal ini untuk menunjukkan apa yang sedang terjadi. Meskipun demikian, tidak selalu aman untuk melakukan hal ini. Misalnya, dalam segitiga seperti pada Gambar 10 di mana kedua sudut bawah dan memiliki ukuran yang sama, kita tidak akan berpikir untuk menunjuknya dengan huruf yang sama.
Perhatikan bahwa rotasi sebesar 180° terhadap tidak lain adalah refleksi melalui . Jadi, jika menunjukkan refleksi melalui , maka kita memiliki
Kita juga memiliki
karena nilai dari masing-masing pemetaan ini pada titik adalah titik yang sama. Meskipun pemetaan ini dijelaskan oleh kondisi yang tampak berbeda, pemetaan tersebut tetap sama. Ingat bahwa, menurut definisi, pemetaan sama jika dan hanya jika
untuk semua titik .
Lebih mudah mengaitkan rotasi dengan angka daripada sudut.
Jika adalah angka antara 0 dan 360, kita misalkan
misalkan rotasi tersebut sebesar sudut derajat. Perhatikan bahwa
tidak lain adalah identitas. (Agar benar-benar tepat, kita juga harus menunjukkan titik dalam notasi kita, tetapi sepanjang pembahasan kita, kita berurusan dengan titik yang sama, dan karenanya kita mengabaikannya. Jika kita ingin menunjukkannya secara eksplisit, kita dapat menulis misalnya
untuk rotasi dengan sudut derajat relatif terhadap titik yang diberikan.)
Misalkan adalah bilangan sembarang. Kita menulis dalam bentuk
di mana adalah bilangan bulat, dan adalah bilangan sedemikian sehingga . Kita mendefinisikan sebagai
Contoh. Misalkan . Kita tulis
Kemudian berdasarkan definisi
adalah rotasi sebesar 140°.
Contoh. Misalkan . Kita tulis
Kemudian
adalah rotasi sebesar 150°.
Contoh. Jika dan adalah bilangan sedemikian sehingga
untuk suatu bilangan bulat , maka
Yaitu, jika dengan suatu bilangan bulat , dan , maka
dan karenanya
Menurut definisi kami, kami memiliki
Kita dapat menginterpretasikan rotasi berlawanan arah jarum jam oleh bilangan negatif sebagai rotasi searah jarum jam oleh bilangan positif.
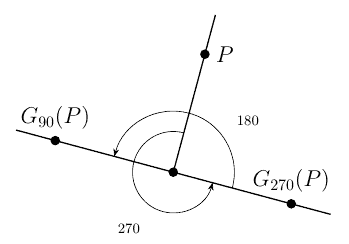
Contoh. Misalkan . Maka
Jadi
Kita dapat memvisualisasikan ini dengan mengatakan bahwa rotasi searah jarum jam sebesar 90° sama dengan rotasi berlawanan arah jarum jam sebesar 270°.
Kita akan menggunakan konvensi dengan mengatakan bahwa rotasi adalah rotasi sebesar derajat, atau bahkan dengan sudut derajat, meskipun mungkin lebih besar dari 360, atau mungkin negatif. Ini adalah bahasa yang mudah dipahami, dan mencerminkan intuisi geometris kita tanpa menimbulkan kebingungan besar.
Translasi
Mari kita pilih sebuah arah pada bidang datar, dan jarak . Kita dapat mewakili hal ini dengan sebuah panah seperti pada Gambar 11. Panah tersebut hanyalah pasangan berurutan dari titik , di mana adalah titik awalnya dan adalah titik akhirnya.
Panah menunjuk ke arah yang diberikan, dan panjang panah sama dengan jarak yang diberikan. Untuk setiap titik , kita mengaitkan titik yang berjarak dari ke arah yang diberikan. Ini adalah pemetaan, yang disebut translasi (ditentukan oleh arah dan jarak yang diberikan). Pada Gambar 12, dengan sebagai translasi ini, kita telah menggambar dua titik dan bayangannya di bawah .
Translasi yang ditentukan oleh pasangan titik terurut akan dilambangkan dengan
Perhatikan bahwa jika , maka , dan adalah identitas.
LATIHAN
Misalkan adalah pemetaan bidang ke dirinya sendiri. Kita mendefinisikan titik tetap untuk sebagai titik sedemikian sehingga .
Jelaskan titik tetap dari pemetaan berikut.
- Identitas
- Refleksi melalui titik tertentu.
- Refleksi melalui sebuah garis.
- Rotasi yang tidak sama dengan identitas, sehubungan dengan titik tertentu.
- Translasi yang tidak sama dengan identitas.
- Dilasi oleh bilangan , relatif terhadap titik tertentu.
Jawaban:
- Semua titik pada bidang adalah tetap.
- Pusat refleksi adalah satu-satunya titik tetap.
- Semua titik pada garis refleksi adalah tetap.
- Pusat rotasi adalah satu-satunya titik tetap.
- Tidak ada titik tetap.
- Pusat dilatasi adalah satu-satunya titik tetap jika . Jika , dilatasi tersebut adalah identitasnya.
Isometri
Misalkan adalah pemetaan bidang ke dirinya sendiri. Kita katakan bahwa mempertahankan jarak, atau bersifat mempertahankan jarak, jika dan hanya jika untuk setiap pasangan titik di bidang, jarak antara dan sama dengan jarak antara dan . Pemetaan semacam itu juga disebut isometri. (“Iso” berarti sama, dan “metri” berarti ukuran. Lebih praktis menggunakan satu kata daripada dua kata untuk pengertian ini.)
Contoh. Pemetaan konstan yang menghubungkan setiap titik dengan titik tertentu bukanlah isometri. Dilatasi dengan 2 bukanlah isometri. Mengapa?
Contoh. Misalkan F adalah salah satu dari pemetaan berikut.
Refleksi melalui sebuah titik
Refleksi melalui sebuah garis
Rotasi
Translasi
Maka F adalah sebuah isometri.
Hal ini akan diasumsikan tanpa bukti. Nantinya, ketika kita memberikan definisi untuk pemetaan ini yang bergantung pada koordinat, kita akan dapat membuktikan bahwa pemetaan ini adalah isometri dengan sangat sederhana. Setiap isometri dapat diperoleh dengan kombinasi sederhana dari contoh-contoh yang diberikan di atas..
Catatan. Misalkan adalah isometri. Jika adalah titik-titik yang berbeda, maka dan harus berbeda, karena jarak antara dan bukan 0, dan karenanya jarak antara dan juga tidak mungkin 0. Bandingkan dengan sifat DIST 1 dari jarak.
Misalkan adalah himpunan titik-titik di bidang datar dan adalah pemetaan bidang datar ke dirinya sendiri. Himpunan titik-titik yang terdiri dari semua titik , untuk semua di , disebut citra di bawah , dan dilambangkan dengan .
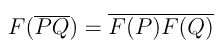
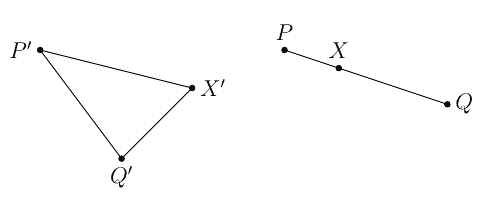
Contoh. Misalkan adalah refleksi melalui garis . Misalkan adalah ruas garis: antara dua titik dan . Maka bayangan di bawah adalah ruas garis: antara dan . Gambar:
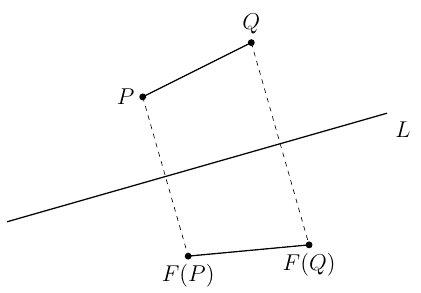
Dengan notasi kita, kita memiliki
Contoh sebelumnya hanyalah kasus khusus dari sifat umum isometri, yang akan kami nyatakan dalam teorema berikutnya.
Teorema 1. Misalkan adalah isometri. Bayangan suatu segmen garis di bawah adalah segmen garis. Bahkan, bayangan segmen garis di bawah adalah segmen garis antara dan .
Bukti. (Lihat Gambar 16.) Misalkan adalah titik pada . Untuk mempermudah, kita nyatakan dengan . Karena mempertahankan jarak, kita tahu bahwa
Dengan SEG 1, kita memiliki
Berdasarkan asumsi pada , kita memiliki
Sekali lagi berdasarkan SEG 1, kita menyimpulkan bahwa harus terletak pada segmen antara dan , sehingga membuktikan bahwa bayangan terkandung dalam segmen .
Kita masih harus membuktikan bahwa setiap titik pada segmen dapat dinyatakan sebagai bayangan di bawah dari sebuah titik pada . Misalkan adalah sebuah titik pada dengan jarak dari . Misalkan adalah titik pada dengan jarak dari . Maka berada pada jarak dari . Dari sini dapat disimpulkan bahwa .
Catatan. Dalam pembuktian ini, kita ingin menunjukkan bahwa dua himpunan titik adalah sama. Kita telah mengikuti pola standar, yaitu kita telah membuktikan bahwa masing-masing merupakan bagian dari yang lain. Pola ini akan diulangi nanti.
Akibat. Suatu isometri mempertahankan garis lurus. Dengan kata lain, jika adalah garis lurus di bidang datar dan adalah isometri, maka (bayangan di bawah ) juga merupakan garis lurus. Jika adalah garis yang melewati dua titik berbeda , maka adalah garis yang melewati dan .
Bukti. Buktinya akan kami serahkan sebagai latihan.
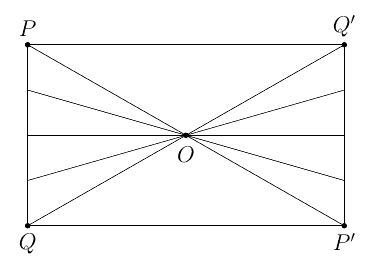
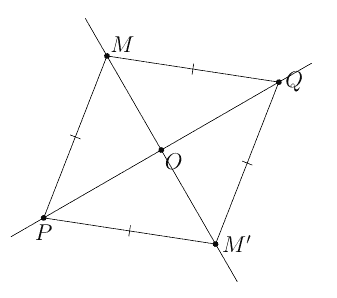
Contoh. Misalkan adalah titik perpotongan diagonal sebuah persegi panjang. Jika kita melakukan refleksi melalui , maka sudut-sudut yang berlawanan akan saling bersinggungan, dan karenanya sisi-sisi yang berlawanan juga akan saling bersinggungan, seperti yang diilustrasikan pada Gambar 17.
Misalkan adalah pemetaan bidang ke dirinya sendiri. Kita ingat bahwa titik tetap dari adalah titik sedemikian sehingga . Titik tetap isometri sekarang akan memainkan peran yang sangat penting dalam mendeskripsikan semua isometri. Kita akan menyelidiki secara sistematis isometri tanpa titik tetap, satu titik tetap, dua titik tetap, dan tiga titik tetap, tetapi dalam urutan terbalik. Dalam kasus terakhir ini, kita akan melihat bahwa isometri tersebut haruslah identitas. Kemudian kita mempertimbangkan setiap kasus dengan satu titik tetap yang lebih sedikit, dan menganalisisnya dengan menggabungkan isometri yang diberikan dengan refleksi, rotasi, atau translasi untuk mendapatkan hasil akhir bahwa setiap isometri harus merupakan gabungan dari hal-hal tersebut.
Teorema 2. Misalkan adalah isometri. Misalkan adalah dua titik berbeda pada bidang datar. Anggaplah bahwa keduanya adalah titik tetap, dengan kata lain
Maka setiap titik pada garis yang melalui adalah titik tetap dari .
Bukti. Kita akan membedakan kasus. Misalkan adalah titik pada garis yang melewati dan . Kita ingin menunjukkan bahwa .
Kasus 1. Titik terletak pada segmen . Misalkan . Karena mempertahankan jarak, maka kita memiliki:
Hingga
Berdasarkan SEG 1, ini berarti terletak pada segmen antara dan . Karena
oleh karena itu, .
Kasus 2. Misalkan tidak terletak pada segmen . Misalkan terletak pada sinar yang memiliki titik puncak dan melewati , tetapi pada jarak dari yang lebih besar daripada jarak dari , seperti pada Gambar 19.
Kemudian
Berdasarkan SEG 1, ini berarti terletak pada segmen antara dan . Oleh karena itu terletak pada garis lurus yang sama, dan karenanya terletak pada garis lurus yang melewati . Karena terletak pada segmen antara dan , kita simpulkan bahwa terletak pada sinar yang memiliki verteks yang melewati . Karena
Oleh karena itu .
Kasus 3. Kasus ini mirip dengan Kasus 2, ketika terletak di sisi lain dari . Dalam kasus ini, peran dan dibalik, dan pembuktian berlanjut seperti pada Kasus 2, dengan menukar dan . Ini mengakhiri pembuktian Teorema 2.
Teorema 3. Misalkan adalah isometri. Misalkan adalah tiga titik berbeda yang tidak terletak pada garis lurus. Asumsikan bahwa adalah titik tetap dari ; yaitu,
Maka adalah identitasnya.
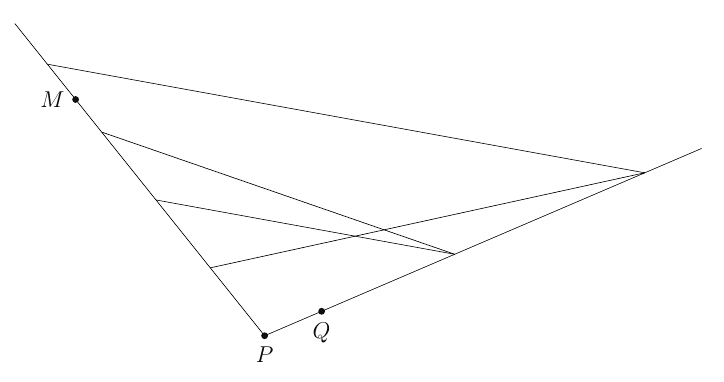
Bukti. Misalkan dan adalah garis yang melewati dan , berturut-turut. Misalkan adalah sebuah titik. Kita harus menunjukkan bahwa . Kita dapat menemukan garis yang melewati yang memotong di titik , dan memotong di titik sedemikian sehingga . (Sebagai contoh, pilih titik pada yang berbeda dari , dan sedemikian sehingga garis tidak sejajar dengan . Misalkan dan misalkan adalah titik perpotongan dan ). Situasi ini diilustrasikan pada Gambar 20.

Berdasarkan Teorema 2, setiap titik pada garis dan adalah tetap. Oleh karena itu, kita memiliki
Sekali lagi berdasarkan Teorema 2, setiap titik pada garis adalah tetap, dan kita menyimpulkan bahwa . Ini membuktikan teorema kita.
Catatan. Suatu konsekuensi yang sangat penting dari teorema ini akan dinyatakan ketika kita memiliki gagasan tentang invers dari suatu isometri.
Komposisi dari Isometri
Kita dapat mengambil isometri secara berurutan. Misalnya, kita dapat terlebih dahulu memutar bidang dengan sudut relatif terhadap titik yang diberikan; kemudian merefleksikan melalui garis yang diberikan; kemudian memutar lagi dengan sudut ; dan akhirnya melakukan translasi. Ketika kita mengambil isometri secara berurutan seperti itu, kita mengatakan bahwa kita mengkomposisikannya.
Secara umum, misalkan adalah isometri. Untuk setiap titik , mari kita kaitkan titik yang diperoleh dengan terlebih dahulu mengambil bayangan di bawah , dan kemudian bayangan titik terakhir ini di bawah . Maka kita memperoleh sebuah asosiasi.
yang merupakan sebuah pemetaan. Bahkan, pemetaan ini adalah sebuah isometri, karena jarak antara dua titik sama dengan jarak antara (karena adalah isometri), dan sama dengan jarak antara (karena adalah isometri). Asosiasi
disebut sebagai gabungan atau komposit dari dan , dan dilambangkan dengan simbol
sehingga kita dapatkan
Contoh. Misalkan adalah titik yang diberikan. Misalkan adalah rotasi sebesar terhadap , dan misalkan adalah refleksi melalui . Maka adalah rotasi sebesar . Kita juga melihat bahwa adalah rotasi sebesar , dan dengan demikian kita dapat menulis
Contoh. Misalkan adalah sembarang isometri dan adalah identitasnya. Maka
Dengan demikian, berperilaku seperti perkalian dengan 1.
Komposisi rotasi. Jika adalah rotasi, relatif terhadap titik yang sama maka juga merupakan rotasi, relatif terhadap .
Misalkan adalah titik yang diberikan dan adalah bilangan . Misalkan adalah titik-titik yang berbeda dari dan berjarak dari . Maka terdapat rotasi unik relatif terhadap , yang memetakan ke (yaitu sedemikian rupa sehingga nilai di adalah ).
Kita akan mengasumsikan pernyataan-pernyataan ini tanpa bukti. Keduanya jelas secara intuitif. Dengan menggunakannya, kita dapat menuliskan rumus yang bagus untuk bilangan komposit. Misalkan adalah titik-titik yang berjarak dari . Maka
Bukti. Citra atau gambar di bawah komposit adalah
yang sama dengan citra di bawah . Berdasarkan asumsi bahwa hanya ada satu rotasi yang memiliki efek ini pada . Oleh karena itu kita mendapatkan rumus pertama. Rumus kedua dibuktikan dengan cara yang serupa, dan bahkan lebih sederhana.
Dalam hal angka, kita juga akan mengasumsikan tanpa bukti fakta berikut, yang secara intuitif jelas.
Misalkan adalah bilangan. Misalkan Gx adalah rotasi yang terkait dengan . Maka
Sebagai contoh
Ini berarti bahwa rotasi 45° diikuti rotasi 45° sama dengan rotasi 90°. Selain itu, seperti pada Gambar 22, kita memiliki
Komposisi translasi. Jika adalah translasi, maka komposisi juga merupakan translasi.
Diberikan titik , terdapat translasi yang unik sedemikian sehingga bayangan di bawah adalah .
Sekali lagi, kita mengasumsikan kedua pernyataan ini tanpa bukti. Sebagai latihan, buktikan rumus-rumus berikut.
Asosiativitas isometri. Misalkan adalah isometri. Maka kita memiliki
Bukti. Untuk setiap titik P, kita memiliki
Ini membuktikan pernyataan sebelumnya, karena kedua peta dan memiliki nilai yang sama di , dan ini berlaku untuk setiap titik .
Kita akan menggunakan notasi yang sama untuk isometri seperti yang kita gunakan untuk angka dalam perkalian. Jika adalah isometri,
dan seterusnya. Kita nyatakan dengan isometri yang diperoleh dengan mengulangi dengan dirinya sendiri sebanyak kali.
Contoh. Misalkan adalah refleksi melalui titik yang diberikan. Maka kita lihat bahwa
Ini seperti relasi . Perhatikan bahwa kita memiliki:
sekali lagi dengan analogi pangkat .
Contoh. Misalkan adalah rotasi sebesar . Maka:
Perhatikan sifat siklik yang menarik dari , yaitu .
Jika adalah isometri, kita definisikan
Kemudian untuk setiap bilangan asli kita memiliki hubungan lama
Dengan demikian, komposisi berprilaku seperti perkalian.
Contoh. Misalkan adalah translasi sejauh cm ke kanan, dan misalkan adalah sebuah titik. Maka adalah titik-titik pada garis horizontal, dan berada cm di sebelah kanan .
Invers dari Isometri
Misalkan adalah sebuah isometri. Yang dimaksud dengan invers (isometri) untuk adalah isometri sedemikian sehingga
Misalkan dan adalah invers dari . Maka
Berdasarkan sifat asosiatif, sisi kiri sama dengan
Dengan demikian kita menemukan
Ini adalah jenis pembuktian yang sama yang kita gunakan sebelumnya untuk membuktikan keunikan invers, dan kita melihat bahwa itu berlaku untuk konteks kita saat ini dengan isometri. Kita menyatakan invers dari dengan jika ada. Asumsikan bahwa inversnya ada. Jika adalah titik, maka relasinya
setara. Memang, jika , maka dengan menerapkan kita peroleh
dan demikian pula untuk kebalikannya. Jika adalah bayangan di bawah , maka kita juga mengatakan bahwa adalah bayangan invers di bawah .
Contoh. Misalkan adalah refleksi melalui garis yang diberikan. Karena
kita menyimpulkan bahwa
Contoh. Untuk setiap angka , misalkan adalah rotasi terkait sebesar derajat. Maka
karena . Misalnya,
Perhatikan juga bahwa jika , maka
Contoh. Misalkan menyatakan translasi yang ditentukan oleh pasangan titik terurut . Ini adalah translasi ke arah sinar dengan titik puncak atau vertex , yang melewati , dan sedemikian rupa sehingga bayangan titik terletak pada jarak dari yang sama dengan panjang segmen . Maka memiliki invers, yang tidak lain adalah , yaitu translasi yang berlawanan arah, tetapi dengan jarak yang sama, karena kita memiliki
Contoh. Misalkan adalah isometri yang memiliki invers dan berturut-turut. Maka komposisi memiliki invers, yaitu
Ini mudah dilihat. Yang perlu kita lakukan hanyalah memverifikasi bahwa sisi kanan yang dikomposisikan dengan di kedua sisi menghasilkan identitas. Tetapi kita memiliki
dan demikian pula di sisi lainnya. Ini membuktikan pernyataan kita.
Misalkan adalah bilangan bulat negatif, katakanlah , di mana bilangan positif. Kita mendefinisikan sebagai komposisi dengan dirinya sendiri sebanyak kali, yaitu
Kita juga mendefinisikan (identitas). Kemudian kita memiliki rumus
Berlaku untuk semua nilai sebagai bilangan bulat. Hubungan ini analog dengan hubungan yang berlaku untuk pangkat bilangan. Kami tidak menyertakan buktinya, yang bagaimanapun juga mudah.
Contoh. Jika adalah translasi 1 cm ke kanan, maka adalah translasi 1 cm ke kiri. Jika adalah translasi 1 cm ke atas, maka adalah translasi 1 cm ke bawah. Demikian juga, adalah translasi 5 cm ke kiri, dan adalah translasi 6 cm ke bawah.
Dengan menggunakan invers, kita sekarang dapat membuktikan sebuah konsekuensi yang sangat berguna dari Teorema 3 yang memberitahu kita kapan dua isometri sama.
Akibat dari Teorema 3. Misalkan adalah tiga titik berbeda yang tidak terletak pada garis yang sama. Misalkan adalah isometri sedemikian sehingga
Anggaplah ada. Maka .
Bukti. Pembuktiannya sangat mudah dan akan dibuat sebagai latihan.
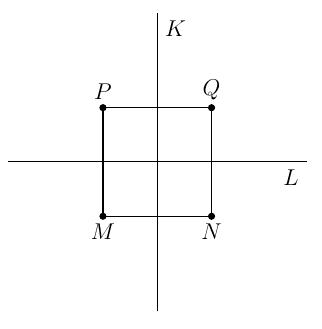
Contoh. Misalkan adalah garis vertikal dan adalah garis horizontal. Misalkan adalah refleksi terhadap dan adalah refleksi terhadap . Maka . Untuk melihat ini, kita hanya perlu memverifikasi bahwa dan memiliki efek yang sama pada tiga sudut persegi yang berpusat di titik perpotongan garis-garis tersebut, dan ini jelas.
Catatan. Akan dibuktikan kemudian bahwa setiap isometri memiliki invers.
Tabel Perkalian
Mari kita sederhanakan notasi dan tulis sebagai pengganti , agar analogi dengan perkalian lebih jelas. Jika adalah refleksi sepanjang garis horizontal dan garis vertikal, masing-masing, seperti di atas, maka kita dapat membuat “tabel perkalian” untuk hasil perkalian keempat elemen , sebagai berikut.
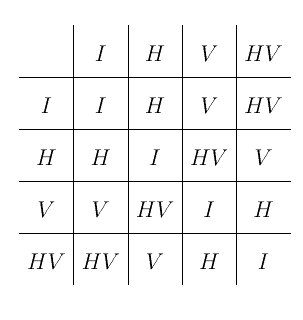
Tabel perkalian ini dibaca seperti tabel perkalian angka. Di tempat baris berpotongan dengan kolom, kita memiliki nilai hasil perkalian elemen paling kiri di baris tersebut, dikalikan dengan elemen paling atas di setiap kolom. Misalnya, hasil perkalian dan adalah
karena
Demikian pula, hasil perkalian dan adalah
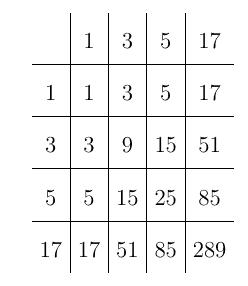
Tabel perkalian untuk angka akan terlihat seperti ini.
Karakterisasi Isometri
Hasil utama dari bagian ini adalah bahwa isometri dapat dinyatakan sebagai gabungan dari translasi, rotasi, dan mungkin refleksi. Pertama-tama kita buktikan hasil perantara.
Teorema 4. Misalkan adalah titik-titik yang berbeda. Misalkan adalah isometri yang membuat dan tetap. Maka adalah identitas, atau adalah refleksi melalui garis yang melewati dan .
Bukti. Misalkan adalah sebuah titik pada garis bagi tegak lurus dari segmen , tetapi tidak terletak pada segmen tersebut, seperti pada gambar berikut.
Maka
Jika ditentukan oleh , yaitu jika , maka kita dapat menerapkan Teorema 3 untuk menyimpulkan bahwa adalah identitas. Misalkan . Misalkan seperti yang ditunjukkan pada Gambar 33. Karena mempertahankan jarak, maka kita memiliki
Oleh karena itu, berdasarkan konsekuensi dari teorema Pythagoras, titik terletak pada garis bagi tegak lurus dari segmen .
Misalkan adalah titik perpotongan dan , yaitu titik tengah antara dan . Sekali lagi, karena mempertahankan jarak, dan karena tetap di bawah , maka kita memiliki
Oleh karena itu, adalah refleksi dari melalui garis lurus . Misalkan menyatakan refleksi melalui garis ini, sehingga kita memiliki . Kita juga memiliki
Pertimbangkan isometri komposit
Hal ini membuat dan tetap. Selanjutnya,
Oleh karena itu, membiarkan tetap. Berdasarkan Teorema 3, kita menyimpulkan bahwa . Dengan menggabungkan di sebelah kiri, kita menemukan
dari mana
dan teorema kita terbukti.
Teorema 5. Misalkan adalah isometri yang menyisakan satu titik tetap. Maka adalah rotasi, atau adalah rotasi yang dikombinasikan dengan refleksi melalui sebuah garis.
Bukti. Misalkan adalah sembarang titik . Jika , maka kita berada dalam kasus Teorema 4 dan kita selesai. Misalkan , dan misalkan . Karena mempertahankan jarak, maka kita memiliki
Terdapat suatu rotasi terhadap yang memetakan pada . Mari kita sebut rotasi ini dengan . Kita tahu bahwa adalah sebuah rotasi, dan
Sehingga
Ini berarti bahwa membuat tetap. Tetapi juga membuat tetap. Oleh karena itu kita dapat menerapkan Teorema 4, dan kita menyimpulkan bahwa adalah identitas atau refleksi . Dalam kasus pertama, kita memiliki
dari situ, dengan menyusun dengan G di sebelah kiri, kita menemukan
dan karenanya
adalah sebuah rotasi.
Pada kasus kedua, kita menemukan
dimana
dan
Ini membuktikan teorema kita.
Teorema 6. Misalkan adalah isometri sembarang pada bidang. Jika tidak meninggalkan titik tetap, maka adalah translasi, atau gabungan translasi dan rotasi, atau gabungan translasi, rotasi, dan refleksi melalui sebuah garis.
Bukti. Misalkan tidak meninggalkan titik tetap. Misalkan adalah sembarang titik dan misalkan . Misalkan adalah translasi sedemikian sehingga . Maka adalah translasi, dan
Karena
Ini berarti bahwa membuat tetap. Tetapi adalah isometri. Oleh karena itu, kita dapat menerapkan Teorema 5, dan kita melihat bahwa
di mana adalah rotasi dan adalah refleksi melalui sebuah garis. Pada kasus pertama, kita temukan
dan pada kasus kedua kita temukan
Hal ini membuktikan teorema kita.
Kongruensi
Misalkan adalah himpunan titik-titik pada bidang datar. Kita akan mengatakan bahwa kongruen dengan jika terdapat isometri sedemikian sehingga bayangan sama dengan .
Teorema 7. Lingkaran-lingkaran dengan jari-jari yang sama adalah kongruen.
Bukti. Misalkan lingkaran pertama adalah , atau berjari-jari , berpusat di , dan lingkaran lainnya adalah , berpusat di . Misalkan adalah translasi yang memetakan ke . Kita tahu bahwa mempertahankan jarak. Oleh karena itu, jika P berjarak dari , maka berjarak dari . Dengan demikian, bayangan lingkaran terkandung dalam lingkaran . Kita masih harus menunjukkan bahwa setiap titik pada adalah bayangan dari sebuah titik pada di bawah . Misalkan Q adalah titik yang berjarak dari . Perhatikan bahwa titik
berada pada jarak dari , dan bahwa . Ini membuktikan pernyataan kita.
Latihan: Misalkan adalah himpunan-himpunan di bidang datar. Buktikan bahwa jika kongruen dengan , dan kongruen dengan , maka kongruen dengan . Buktikan bahwa jika kongruen dengan , maka kongruen dengan .
Jawab: kongruen dengan berarti terdapat isometri sedemikian sehingga . Lebih lanjut, kongruen dengan berarti terdapat isometri sedemikian sehingga . Tetapi kemudian . Karena adalah isometri, maka kongruen dengan .
Misalkan adalah himpunan titik-titik pada bidang datar. Kita akan mengatakan bahwa kongruen dengan jika terdapat isometri sedemikian sehingga bayangan sama dengan .
Teorema 8. Dua segmen apa pun yang memiliki panjang yang sama adalah kongruen.
Bukti. Misalkan dan adalah segmen dengan panjang yang sama. Misalkan adalah translasi yang memetakan pada . Maka berjarak sama dari seperti , karena adalah isometri. Oleh karena itu, terdapat rotasi terhadap sedemikian sehingga . Dengan demikian, kita simpulkan bahwa memetakan pada , sehingga membuktikan teorema kita.
Dua langkah pembuktian dalam Teorema 8 yang berkaitan dengan dan diilustrasikan pada Gambar 26.
Perhatikan Latihan di atas. Berdasarkan latihan ini, kita juga dapat merumuskan bukti Teorema 8 sebagai berikut. Kita misalkan adalah translasi sedemikian sehingga . Karena citra di bawah kongruen dengan , kita direduksi ke kasus ketika , yang sekarang kita asumsikan. Berdasarkan asumsi,
Oleh karena itu, terdapat rotasi terhadap sedemikian sehingga . Berdasarkan teoreme sebelumnya, kita simpulkan bahwa kongruen dengan . Dengan demikian, pembuktian selesai.
Dengan menggunakan bahasa seperti yang kita lakukan, mereduksi pembuktian ke kasus ketika , memiliki sedikit keuntungan yaitu kita menghindari keharusan menulis komposit secara eksplisit. Kita akan merumuskan pembuktian Teorema 10 dengan cara itu juga. Perhatikan bahwa Teorema 10 adalah kasus kekongruenan klasik dari pembahasan dasar geometri bidang, yang menemukan tempat alaminya dalam sistem kita saat ini.
Teorema 9. Misalkan dan adalah segitiga siku-siku yang sudut siku-sikunya masing-masing berada di dan . Asumsikan bahwa sisi-sisi yang bersesuaian memiliki panjang yang sama, yaitu:
dan
Maka segitiga-segitiga tersebut kongruen.
Sebenarnya, Teorema 9 adalah kasus khusus dari hasil yang lebih umum, yang dinyatakan dalam teorema berikutnya, dan pembuktiannya akan kami berikan secara lengkap.
Teorema 10. Misalkan dan adalah segitiga yang sisi-sisi yang bersesuaiannya memiliki panjang yang sama, yaitu
Maka segitiga-segitiga tersebut kongruen.
Bukti. Terdapat translasi yang memetakan pada . Oleh karena itu, cukup membuktikan pernyataan kita ketika . Sekarang kita mengasumsikan ini, yaitu . Karena , terdapat rotasi relatif terhadap yang memetakan pada . Rotasi ini membuat tetap. Kita direduksi ke kasus ketika
dan
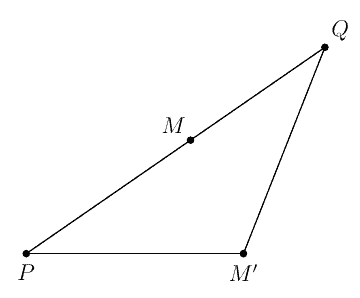
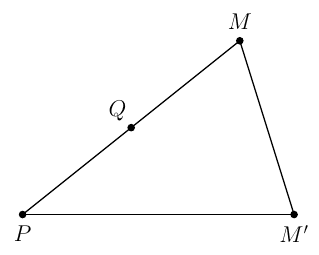
Kita mengasumsikan bahwa ini adalah kasusnya. Sekarang, , atau . Misalkan . Kita ilustrasikan ini dengan Gambar 32.

Misalkan adalah garis yang melewati dan . Berdasarkan Korolari teorema Pythagoras, dan fakta bahwa
dan
Kita menyimpulkan bahwa adalah garis bagi tegak lurus dari . Secara khusus, adalah refleksi dari melalui . Oleh karena itu, jika kita merefleksikan melalui , kita mendapatkan . Dengan demikian, kita telah menemukan komposisi isometri yang memetakan pada , pada , dan pada . Berdasarkan teorema sebelumnya, kita menyimpulkan bahwa segitiga-segitiga kita kongruen, seperti yang akan dibuktikan.
Catatan. Pada Teorema 7 hingga 10, kita telah membahas bangun-bangun yang terdiri dari segmen garis. Tentu saja, kita mungkin juga ingin membahas jenis bangun lain, misalnya cakram, atau, katakanlah, daerah segitiga yang dibatasi oleh segitiga, atau daerah yang dibatasi oleh persegi panjang. Karena itu, akan bermanfaat untuk memiliki deskripsi daerah-daerah ini dalam bentuk segmen garis. Kita akan menggunakan segitiga sebagai contoh.
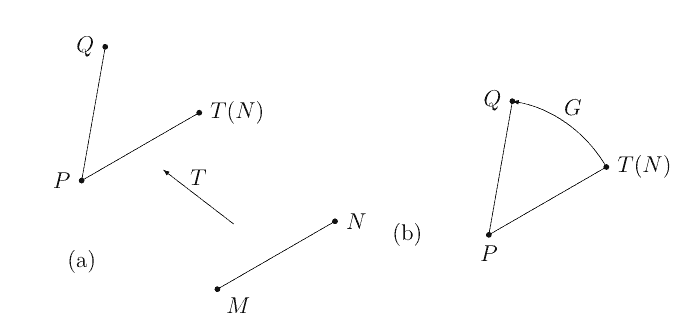
Misalkan adalah sebuah segitiga, dan misalkan adalah wilayah yang dibatasi oleh segitiga tersebut. Kita merepresentasikan sebagai wilayah yang diarsir pada Gambar 28(a).

Kita dapat memberikan definisi hanya dengan menggunakan konsep segmen garis dengan mengatakan bahwa terdiri dari semua titik pada semua segmen garis , di mana mencakup semua titik . Melihat Gambar 28 (b) meyakinkan kita bahwa ini memang bertepatan dengan intuisi geometris kita tentang wilayah segitiga. Dengan menggunakan definisi ini, maka sangat mudah untuk melihat bahwa jika adalah isometri, maka bayangan adalah wilayah segitiga yang dibatasi oleh segitiga yang titik sudutnya adalah . Lakukan pembuktian secara detail sebagai latihan. Definisi ini juga merupakan definisi yang digunakan baik dalam matematika murni maupun matematika terapan (misalnya ekonomi).
Demikian pula, misalkan dan adalah dua sinar yang mendefinisikan sudut yang ukurannya kurang dari . Sudut tersebut dapat digambarkan sebagai himpunan semua titik pada semua segmen , di mana adalah titik pada dan adalah titik pada seperti pada Gambar 29.
Isometri dan luas. Pada bagian selanjutnya, kita akan membahas konsep luas. Kita mungkin tertarik untuk mengetahui bagaimana luas suatu wilayah berperilaku di bawah isometri. Wajar untuk mengambil pernyataan berikut sebagai aksioma dasar.
Misalkan adalah suatu daerah pada bidang datar, yang luasnya sama dengan . Misalkan adalah suatu isometri. Maka luas juga sama dengan .
Untuk meyakinkan diri kita bahwa ini adalah pernyataan yang masuk akal, kita dapat menggunakan karakterisasi isometri. Jika kita memvisualisasikan rotasi, refleksi, atau translasi, maka intuisi kita memberi tahu kita bahwa, dalam setiap kasus, luas suatu wilayah tetap terjaga di bawah setiap pemetaan ini. Karena setiap isometri merupakan gabungan dari pemetaan tersebut, kita melihat bahwa luas suatu wilayah tetap terjaga di bawah isometri sembarang.
Misalkan A adalah sudut dan F adalah isometri. Maka F(A) adalah sudut yang ukurannya sama dengan ukuran sudut A. Kita dapat melihat ini dari definisi sudut, dengan melihat bagian sudut A yang terletak pada cakram yang berpusat di titik sudut Ay dan menggunakan fakta bahwa isometri mempertahankan luas. Kita telah menggambarkan kasus ketika isometri adalah translasi Tpp> pada Gambar 6-35. Namun, perhatikan bahwa refleksi membalik urutan sinar yang digunakan untuk menghitung ukuran sudut dalam arah berlawanan arah jarum jam. Gambarlah gambarnya.
Referensi
Serge Lang. (1988). Basic mathematics. Springer. https://doi.org/10.1007/978-1-4612-1027-6
Tinggalkan Balasan